myCobotPro 柔性夹爪-两指电动
适配型号:myCobot 320、myCobot Pro 600
产品图示


规格说明:
| 名称 name | myCobotPro 柔性夹爪-两指电动 白色 |
|---|---|
| 材料 | 光敏树脂+尼龙+金属+塑胶 |
| 工艺 technology | 3D 打印 |
| 夹持范围 clamp size | 0mm-160mm |
| 最大夹持力 clamp force | 1000 克 |
| 重复精度 precision | 0.5 毫米 |
| 使用寿命 lifetime | 1 年 |
| 驱动方式 drive | 电动 |
| 传动方式 transmission | 齿轮+连杆 |
| 尺寸 size | 178*80*69mm |
| 重量 weight | 300 克 |
| 固定方式 fixed | 螺丝固定 |
| 使用环境要求 | 常温常压 |
| 控制接口 control | 串口/IO 控制 |
| 适用设备 | ER myCobot 320 M5 |
ER myCobot 320 Pi ER myCobot Pro 600 |
柔性夹爪-两指电动: 夹取物体使用
简介
- 传统工业吸盘需要吸取物料的平整表面,在越来越多的工况中,吸取表面容易损伤面板或元器件,柔触夹爪捏边抓取,轻松无痕无损搬运面板,确保产品表面无瑕疵,提升良品率。
- 柔触夹爪的模块化设计,自重轻,可以按照面板尺寸自由排列组合。
- 传统气缸的夹持力普遍较大,且力度难以控制,夹持面板的边缘容易夹伤夹翘,柔性夹爪的单指夹持力精准可控,不会夹伤脆弱工件。
工作原理
- 柔性夹爪是研究人员模仿海星腕足的形态,研发出的一种创新型仿生柔性夹具。软爪的“手指”是由高分子硅胶柔性材料制作而成,通过充气实现弯曲形变,能够像海星一样,自适应地包覆住目标物体,可完成对异形、易损物品的柔性、无损抓取 。
适用物体
- 合理大小内的任意形状物体
安装使用
夹爪安装:
结构安装:
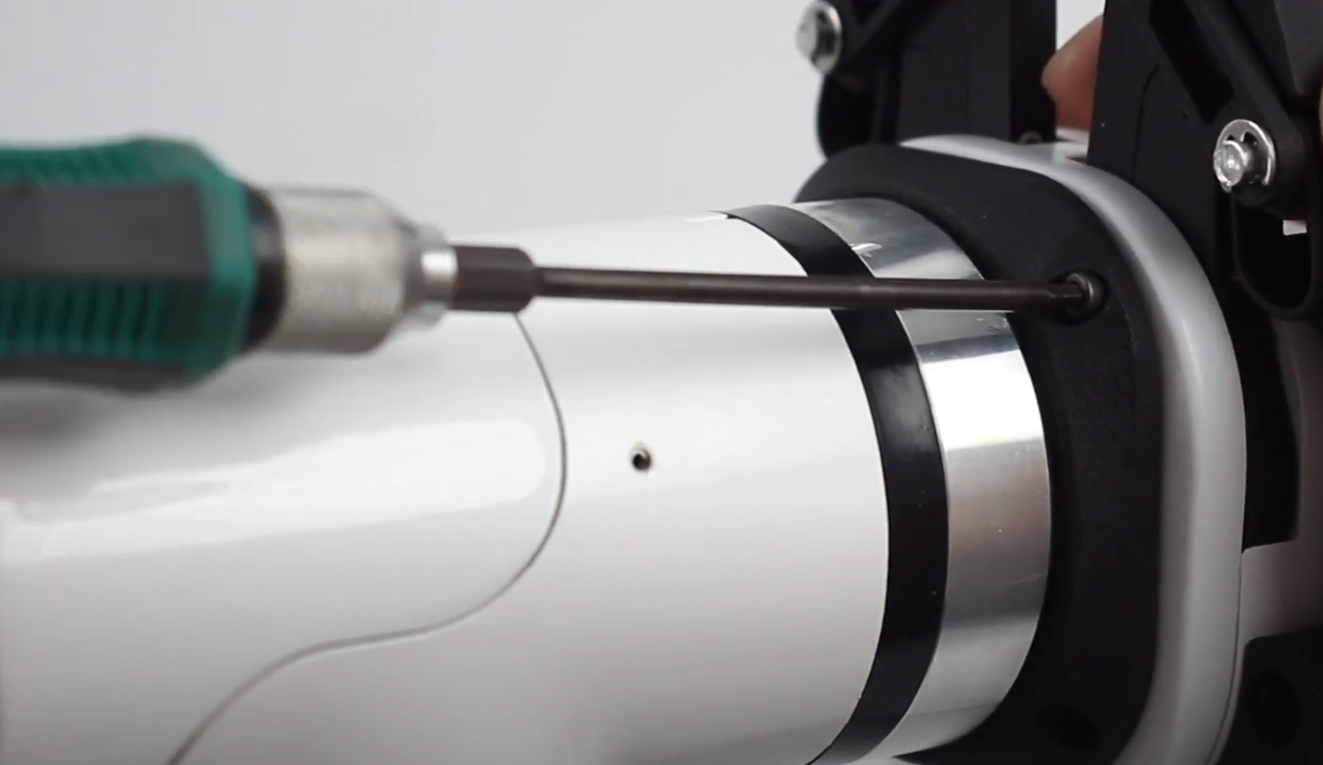
将垫片对准机械臂末端孔位,配合螺丝拧紧:

将夹爪的螺丝孔对准垫片四周的孔位,配合细螺丝拧紧:
电气连接:
注意在机械臂断电状态下进行。
- 将 m8 线对准机械臂的接口,注意接口处有缺口,连接线有对应突起,确认方向后插入,并拧紧:

- 插入夹爪控制接口,同样注意缺口的方向:

- 将 m8 线对准机械臂的接口,注意接口处有缺口,连接线有对应突起,确认方向后插入,并拧紧:
myCobot Pro 320 使用说明
编程开发(python):
使用 python 对夹爪进行编程开发: python 环境下载
新建 python 文件:
在想要的文件路径下右键新建 python 文件: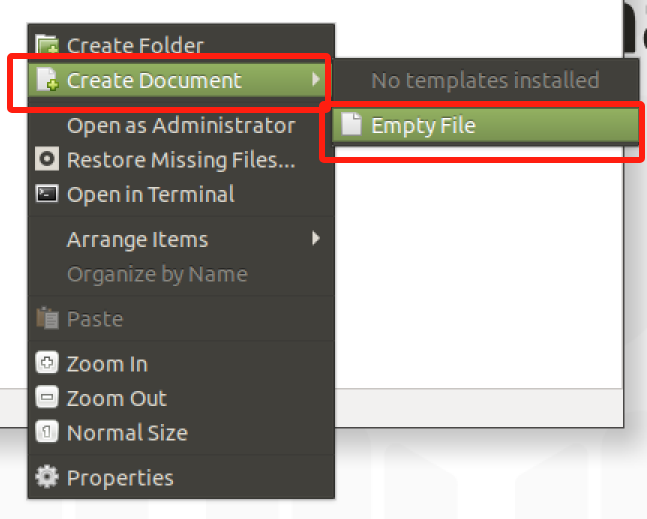
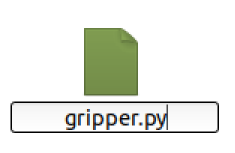
文件名字可以根据需要修改
进行功能编程:
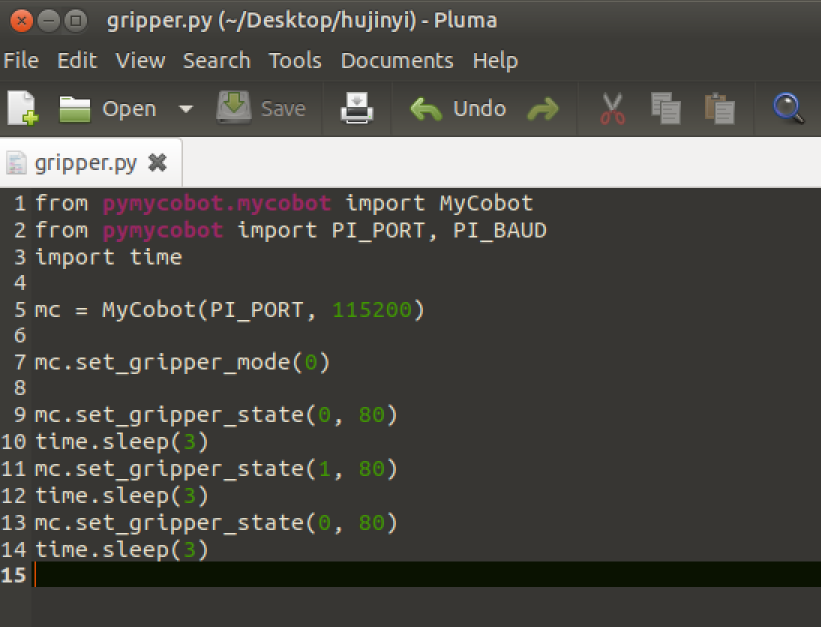
代码如下:
- M5 版本:
from pymycobot import MyCobot320 import time # 初始化一个MyCobot320对象 mc = MyCobot320("COM3", 115200) #设置夹爪为485模式 mc.set_gripper_mode(0) # 控制夹爪打开-关闭-打开: #使用夹爪状态接口0为张开,1为关闭 mc.set_gripper_state(0, 80) time.sleep(3) mc.set_gripper_state(1, 80) time.sleep(3) mc.set_gripper_state(0, 80) time.sleep(3) # 详细接口使用可以查看python API- Pi 版本:
from pymycobot import MyCobot320 from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot320初始化 import time # 初始化一个MyCobot320对象 mc = MyCobot320(PI_PORT, 115200) #设置夹爪为485模式 mc.set_gripper_mode(0) # 控制夹爪打开-关闭-打开: #使用夹爪状态接口0为张开,1为关闭 mc.set_gripper_state(0, 80) time.sleep(3) mc.set_gripper_state(1, 80) time.sleep(3) mc.set_gripper_state(0, 80) time.sleep(3) # 详细接口使用可以查看python API保存文件并关闭,在文件夹空白处右键打开命令行终端
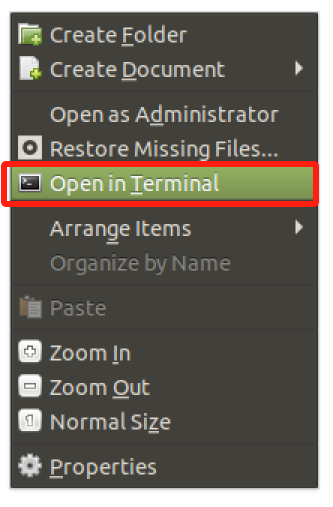
输入:
python gripper.py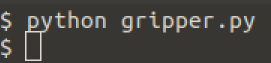
可以看到夹爪打开-关闭-打开
编程开发(myblockly):
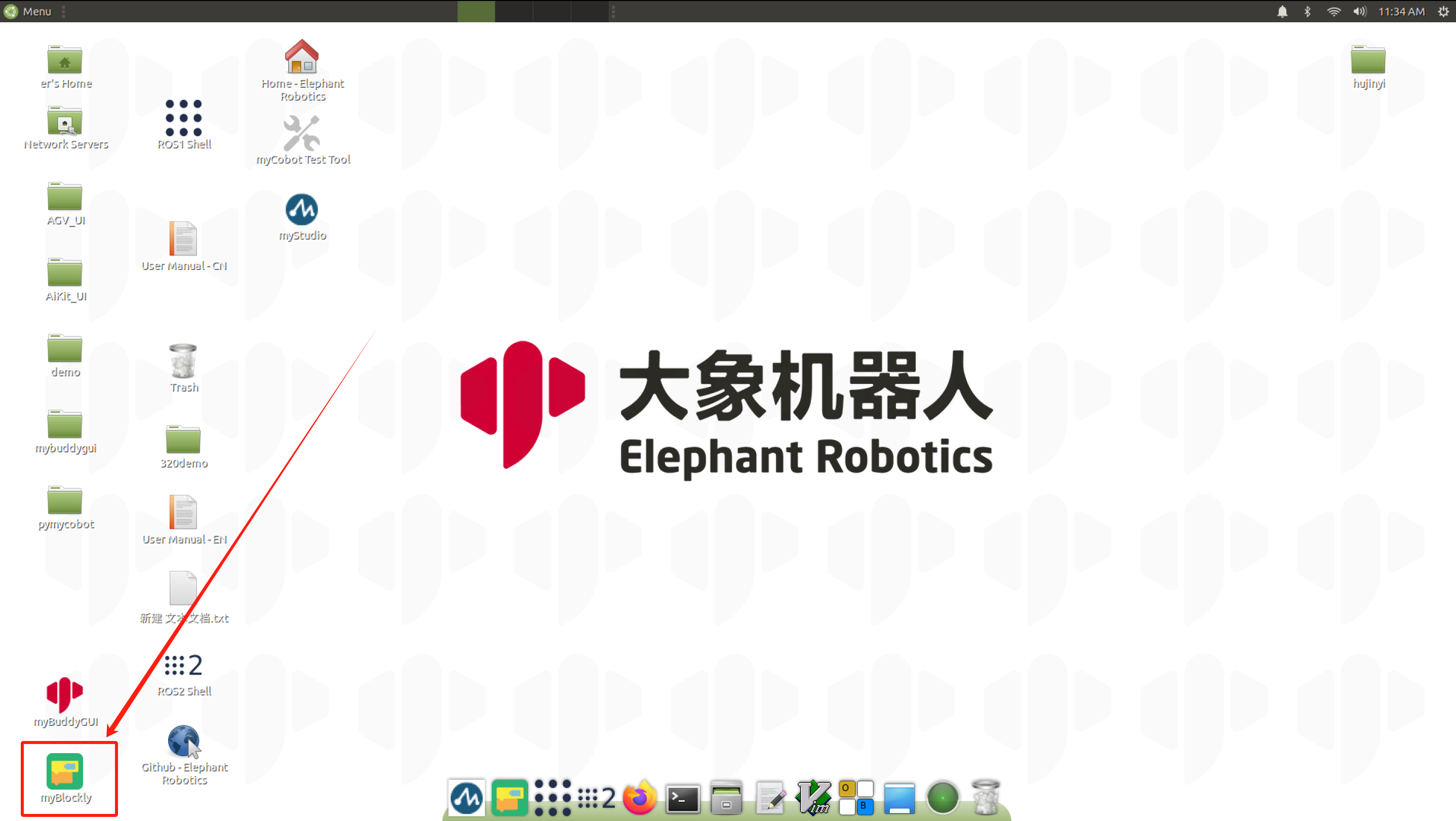
使用 myblockly 对夹爪进行编程开发: myblockly 下载
注意使用 myblockly 开发前,需要先用 python 程序运行过mc.set_gripper_mode(0),将夹爪设置为 485 模式。- 确认结构及电气连接都完成后,启动机械臂,出现图形界面后打开 myblockly 软件
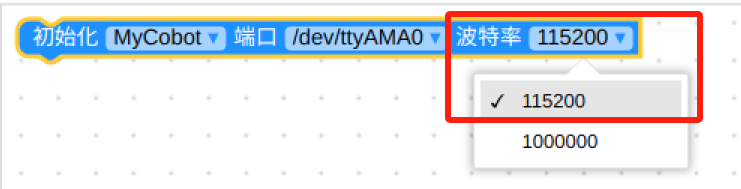
- 修改波特率为 115200
- 在左侧列表找到
夹爪,选择设置夹爪值模块
- 拖动模块连接在
初始化mycobot模块下面,根据需要修改张开的程度和速度,这里都设置为70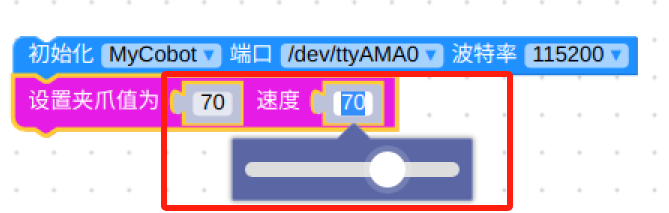
- 在
时间,选择睡眠模块
- 设置时间为
2 秒,目的是留出夹爪运动时间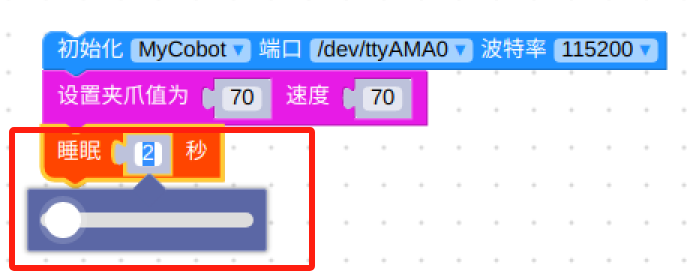
- 重复选择一次
设置夹爪值和睡眠模块,将设置夹爪值张开程度改为0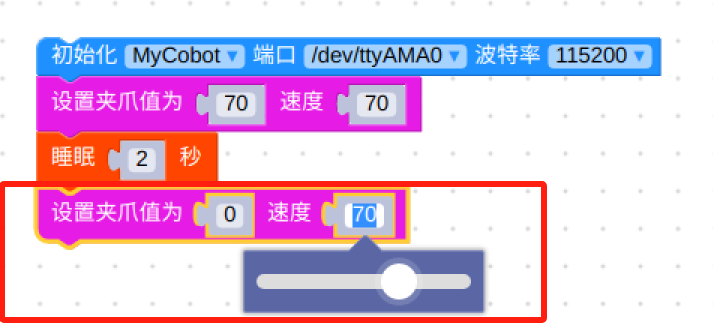
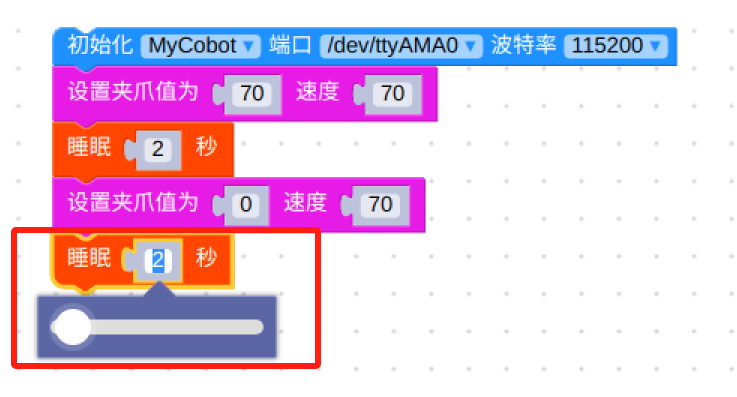
- 在左侧列表找到
夹爪,选择设置夹爪值模块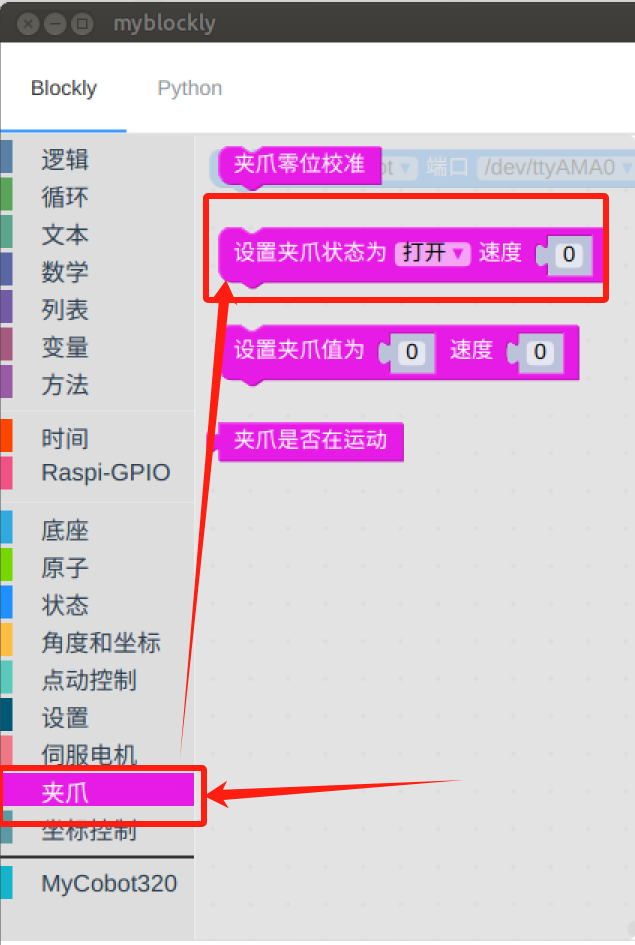
- 修改状态为
打开,速度为70
- 点击右上角的绿色运行图标,可以看到夹爪
打开-关闭-打开的运动状态
- 确认结构及电气连接都完成后,启动机械臂,出现图形界面后打开 myblockly 软件